פרק 6 - משוואת לפלאס: Difference between revisions
EMFWIKIAdmin (talk | contribs) |
EMFWIKIAdmin (talk | contribs) |
||
| (13 intermediate revisions by the same user not shown) | |||
| Line 14: | Line 14: | ||
<br> | <br> | ||
<math display="block"> | <math display="block"> | ||
\frac{\partial\phi | \frac{\partial\phi}{\partial n}_{r=r_{B,2}}=g(r_{B,2}) | ||
</math> | </math> | ||
| Line 121: | Line 121: | ||
\iiint\iiint \frac{\rho(r)\rho(r')}{|r-r'|} dV dV'</math> | \iiint\iiint \frac{\rho(r)\rho(r')}{|r-r'|} dV dV'</math> | ||
=== משפט הערך הממוצע (איור 2) | === משפט הערך הממוצע === | ||
משפט הערך הממוצע אומר שכל פתרון למשוואת לפלס בנקודה מסוימת שווה לממוצע ערכי הפתרון על כדור שהנקודה נמצאת במרכזו (איור 2). | |||
[[File:Pic602.png|200px|thumb|left|איור 2]] | [[File:Pic602.png|200px|thumb|left|איור 2]] | ||
<math display="block">\phi(r) =\frac{1}{4\pi a^2} | <math display="block">\phi(r) =\frac{1}{4\pi a^2} | ||
\iint_{\text{sphere}} \phi(r') dS'</math> | \iint_{\text{sphere}} \phi(r') dS'</math> | ||
<math display="block">\frac{1}{4\pi a^2} | את הפוטנציאל על שפת הכדור ניתן לרשום ע"י | ||
\iint_{\text{sphere}} \phi(r') dS' = \frac{1}{4\pi a^2} | <math display="block"> | ||
\ | \phi(r')=\phi(r)+\left(-\int_r^{r'}\vec{E}\cdot\hat{R}dR\right) | ||
</math><math display="block"> | </math> | ||
כאשר את האינטגרציה בחרנו לעשות בכיוון הרדיאלי. מאחר והשדה משמר, אנו רשאים לבחור את מסלול האינטגרציה כרצוננו. | |||
\ | כעת, נציב בחישוב הערך הממוצע | ||
\underbrace{\iint_{\text{Sphere}} \vec E | |||
{=0 \text{ propotional to the flux of the field}} | <math display="block"> | ||
\frac{1}{4\pi a^2}\iint_{\text{sphere}} \phi(r') dS' = | |||
</math> | |||
<math display="block"> | |||
=\frac{1}{4\pi a^2}\iint_{\text{sphere}}\left[ \phi(r)+\left(-\int_r^{r'}\vec{E}\cdot\hat{R}dR\right) \right]dS'= | |||
</math> | |||
נחליף את סדר האינטגרציה | |||
<math display="block">= | |||
\phi(r) - \int_r^{r'}dR\left[\underbrace{\iint_{\text{Sphere}} \vec E \cdot \hat{R} dS'}_{=0 \text{ propotional to the flux of the field}}\right] | |||
= \phi(r)</math> | |||
=== ייצוג נומרי מקורב למשוואת לפלאס === | === ייצוג נומרי מקורב למשוואת לפלאס === | ||
<math display="block">\phi_{xx} + \phi_{yy} + \phi_{zz}=0</math><math display="block">\begin{cases} | משוואת לפלס בקורדינטות קרטזיות היא | ||
\phi(x+\ | <math display="block">\phi_{xx} + \phi_{yy} + \phi_{zz}=0 | ||
\ | </math> | ||
\phi(x | אם נסתכל על נקודה ספציפית <math> (x,y,z) </math>, נוכל לרשום את ערכי הפוטנציאל בסביבתה ע"י פיתוח של הפוטנציאל לטור טיילור | ||
\ | <br> | ||
\phi(x,y+\ | <math display="block"> | ||
\ | \begin{cases} | ||
y-\ | \phi(x+\Delta x,y,z)=\phi(x,y,z)+ \Delta x\frac{\partial \phi}{\partial x}+\frac{1}{2}\Delta x ^2\frac{\partial^2 \phi}{\partial x^2} +... \\ | ||
\end{cases}</math>נניח ש | \phi(x+\Delta x,y,z)=\phi(x,y,z)- \Delta x\frac{\partial \phi}{\partial x}+\frac{1}{2}\Delta x ^2\frac{\partial^2 \phi}{\partial x^2} +... \\ | ||
\phi(x,y+\Delta y,z)=\phi(x,y,z)+ \Delta y\frac{\partial \phi}{\partial y}+\frac{1}{2}\Delta y ^2\frac{\partial^2 \phi}{\partial y^2} +... \\ | |||
\phi(x,y-\Delta y,z)=\phi(x,y,z)- \Delta y\frac{\partial \phi}{\partial y}+\frac{1}{2}\Delta y ^2\frac{\partial^2 \phi}{\partial y^2} +... \\ | |||
\phi(x,y,z+\Delta z)=\phi(x,y,z)+ \Delta z\frac{\partial \phi}{\partial z}+\frac{1}{2}\Delta z ^2\frac{\partial^2 \phi}{\partial z^2} +... \\ | |||
\phi(x,y,z-\Delta z)=\phi(x,y,z)- \Delta z\frac{\partial \phi}{\partial z}+\frac{1}{2}\Delta z ^2\frac{\partial^2 \phi}{\partial z^2} +... | |||
\end{cases} | |||
</math> | |||
נניח ש <math>\Delta x = \Delta y = \Delta z \equiv \Delta</math>. בנוסף נניח ש <math>\Delta</math> הוא ממש קטן, כך שקירוב סדר שני הוא מספיק. | |||
נסכום את כל המשוואות: | |||
<math display="block"> | |||
\phi(x+\Delta) + \phi(x-\Delta) + \phi(y+\Delta) + \phi(y-\Delta)+\phi(z+\Delta)+\phi(z-\Delta) = | |||
6 \phi(x,y,z) + \Delta^2 \underbrace{\left(\frac{\partial^2 \phi}{\partial x^2} + | |||
\frac{\partial^2 \phi}{\partial y^2} + \frac{\partial^2 \phi}{\partial z^2}\right)}_{=0} | |||
<math display="block">\phi(x+\ | </math> | ||
+ | נחלק ב - 6 ונקבל | ||
\phi(z+\ | <math display="block">\phi(x,y,z) = \frac{1}{6} [\phi(x+\Delta) + \phi(x-\Delta) + \phi(y+\Delta) + \phi(y-\Delta)+\phi(z+\Delta)+\phi(z-\Delta)] | ||
6 \phi(x,y,z) + \ | </math> | ||
\frac{\partial^2 \phi}{\partial y^2} + \frac{\partial^2 \phi}{\partial z^2})}_{=0}</math>נחלק ב - 6 ונקבל | כלומר, | ||
<math>\phi | |||
<math display="block">\phi(x,y,z) = 1 | </math> בנקודה x,y,z שווה לממוצע של הערכים בנקודת הסריג שמקיפות את הנקודה. | ||
+ | |||
\phi(z+\ | |||
== פתרון בהפרדת משתנים == | == פתרון בהפרדת משתנים == | ||
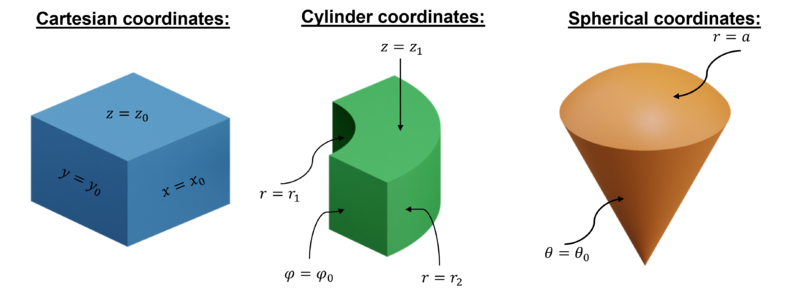
הפרדת משתנים היא טכניקת לפתרון משוואות דיפרנציאליות חלקיות כאשר פותרים בתחום ספרבילי - תחום שאת כל השפות שלו ניתן לתאר כמשטחים שווי קורדינטה. אפשרויות שונות לצורת התחום במערכות קורדינטות שונות ניתן לראות באיור 3. | |||
טכניקת | <gallery widths=800px heights=350px class="center"> | ||
File:Pic603.png|איור 3 - פתרון בהפרדת משתנים בקורדינטות שונות | |||
</gallery> | |||
== הפרדת משתנים בקורדינטות קרטזיות == | |||
משוואת לפלאס בקורדינטות אלו:<math display="block">\phi_{xx} + \phi_{yy}+\phi_{zz}=0</math> | |||
פתרון בהפרדת משתנים הוא פתרון המורכב ממכפלה של פונקציות, שכל אחת מהן תלויה במשתנה אחד בלבד, מהצורה | |||
<math display="block"> | |||
\Phi = X(x) Y(y) Z(z) | |||
</math> | |||
נציב בלפלאס: | |||
<math display="block"> | <math display="block">X''YZ+XY''Z+XYZ''=0</math> | ||
נחלק ב <math> XYZ </math>, ונקבל: | |||
<math display="block">\underbrace{\frac{X''}{X}}_{=-k_x^2 \text{ depends only on x}} + | <math display="block">\underbrace{\frac{X''}{X}}_{=-k_x^2 \text{ depends only on x}} + | ||
\underbrace{\frac{Y''}{Y}}_{=-k_y^2 \text{ depends only on y}} + | \underbrace{\frac{Y''}{Y}}_{=-k_y^2 \text{ depends only on y}} + | ||
\underbrace{\frac{Z''}{Z}}_{=-k_z^2 \text{ depends only on z}} =0</math><math display="block">\Rightarrow | \underbrace{\frac{Z''}{Z}}_{=-k_z^2 \text{ depends only on z}} =0</math> | ||
k_x^2 + k_y^2 + k_z^2=0</math>מכאן, | מאחר וכל אחד מהמחוברים תלוי במשתנה יחיד, ושונה מהמחוברים האחרים, נובה שכל אחד משלושת המחברים חייב להיות פונקציה קבועה שאינה תלויה בקורדינטות. הקבועים חייבים לקיים את הקשר | ||
<math display="block">\Rightarrow | |||
k_x^2 + k_y^2 + k_z^2=0</math> | |||
מכאן, הבעיה "מופרדת" ל-3 משוואות דיפרנציאליות רגילות: | |||
<math display="block">(1) \frac{X''}{X}=-k_x^2,\;\;(2) \frac{Y''}{Y}=-k_y^2\;\;(3) \frac{Z''}{Z}=-k_z^2</math> | |||
<math display="block">(1) \frac{X''}{X}=-k_x^2,\ | |||
(2) \frac{Y''}{Y}=-k_y^2 \ | |||
(3) \frac{Z''}{Z}=-k_z^2</math> | |||
* הפיתרון הטריוויאלי: | * הפיתרון הטריוויאלי: | ||
| Line 204: | Line 224: | ||
באופן כללי, תמיד ניתן לרשום: | באופן כללי, תמיד ניתן לרשום: | ||
<math display="block">\phi = (A\cos(k_x x)+B\sin(k_x x))\cdot (C\cos(k_y y)+D\sin(k_y y)) | <math display="block"> | ||
\cdot (E\cos(k_z z)+F\sin(k_z z))</math>מכיוון ש <math>k_x^2+k_y^2+k_z^2=0</math> , | \phi = (A\cos(k_x x)+B\sin(k_x x))\cdot (C\cos(k_y y)+D\sin(k_y y)) | ||
\cdot (E\cos(k_z z)+F\sin(k_z z)) | |||
</math> | |||
מכיוון ש <math>k_x^2+k_y^2+k_z^2=0</math> , חלק מהקבועים חייבים להיות מדומים. | |||
אופציה נוספת: לכתוב חלק | אופציה נוספת: לכתוב חלק מהפתרונות כפונקציות טריגונומטריות וחלק כאקספוננציאליות, כך ש: | ||
<math display="block">\underbrace{\ | <math display="block">\underbrace{\sum_m k_m^2}_{\text{Trigonometric}} = | ||
\underbrace{\ | \underbrace{\sum_n \tilde k_n^2}_{\text{Exponential}}</math> | ||
==== קורדינטות קרטזיות - דוגמא 1 | ==== קורדינטות קרטזיות - דוגמא 1 ==== | ||
[[File:Pic604.png|200px|thumb|left|איור 4]] | [[File:Pic604.png|200px|thumb|left|איור 4]] | ||
באיור 4 נתון קבל לוחות. מתקיים - | |||
* הפוטנציאל בין לוחות הקבל מקיים <math>\nabla^2\phi = 0</math> | * הפוטנציאל בין לוחות הקבל מקיים <math>\nabla^2\phi = 0</math> | ||
* התחום ספירבילי | * התחום ספירבילי | ||
| Line 225: | Line 248: | ||
<math display="block">\phi(z=0)=F=0,\phi(z=d)=Ed= V </math><math display="block">\Rightarrow \phi=\frac{V}{d}\cdot z \Rightarrow\vec E = -\nabla \phi =-\frac{V}{d} \hat z</math> | <math display="block">\phi(z=0)=F=0,\phi(z=d)=Ed= V </math><math display="block">\Rightarrow \phi=\frac{V}{d}\cdot z \Rightarrow\vec E = -\nabla \phi =-\frac{V}{d} \hat z</math> | ||
==== קורדינטות קרטזיות - דוגמא 2 | ==== קורדינטות קרטזיות - דוגמא 2 ==== | ||
[[File:Pic605.png|200px|thumb|left|איור 5]] | [[File:Pic605.png|200px|thumb|left|איור 5]] | ||
באיור 5 נתון המבנה הבא - חריץ דו-ממדי (אינסופי בכיוון הניצב לדף), ומעליו קובעים את הפוטנציאל על השפה העליונה, <math> \phi(y=a)=V(x) </math>. | |||
נרצה לחשב את הפוטנציאל בתוך החריץ. | |||
מאחר והבעיה דו-ממדית, נצפה שהפוטנציאל כלל לא יהיה תלוי בקורדינטה <math> z </math>, ולכן <math> k_z=0 </math>. | |||
המשוואה שהפוטנציאל מקיים בתוך החריץ היא משוואת לפלאס, ולכן אנו יכולים לבחור את הפתרון מתוך "קטלוג" הפתרונות שפיתחנו לבעיות קרטזיות. | |||
<math display="block">\begin{cases} | <math display="block">\begin{cases} | ||
| Line 237: | Line 261: | ||
\text{Static problem: } \nabla \times \vec E = \mu_0 \frac{\partial H}{\partial t}=0 | \text{Static problem: } \nabla \times \vec E = \mu_0 \frac{\partial H}{\partial t}=0 | ||
\Rightarrow \vec E = -\nabla \phi | \Rightarrow \vec E = -\nabla \phi | ||
\end{cases}</math> | \end{cases}</math> | ||
תנאי שפה: | |||
<math display="block">\begin{cases} | <math display="block">\begin{cases} | ||
\phi(x=0)=\phi(x=d)=0 \\ | \phi(x=0)=\phi(x=d)=0 \\ | ||
| Line 246: | Line 271: | ||
|k_x|=|k_y|\equiv k</math>ולכן נכתוב את הפיתרון כך: | |k_x|=|k_y|\equiv k</math>ולכן נכתוב את הפיתרון כך: | ||
<math display="block">\phi = (A\sin(k x) + B\cos(k x))\cdot (C\sinh(k y) + D\cosh(k y))</math>נציב בתנאי שפה: | <math display="block">\phi = (A\sin(k x) + B\cos(k x))\cdot (C\sinh(k y) + D\cosh(k y))</math> | ||
כאשר האינטואיציה לבחירת צורה זו נובעת מהעובדה שהפוטנציאל בבעיה זו מתאפס בשתי קורדינטות <math> X </math> שונות, ולכן בכיוון זה חייב להיות פתרון טריגונומטרי. נציב בתנאי שפה: | |||
<math display="block">\begin{cases} | <math display="block">\begin{cases} | ||
| Line 252: | Line 278: | ||
\phi(x=d)=A\sin(k d)\cdot f(y)=0 \Rightarrow \sin(kd)=0\Rightarrow k=\frac{\pi n}{d} , n\in\N\\ | \phi(x=d)=A\sin(k d)\cdot f(y)=0 \Rightarrow \sin(kd)=0\Rightarrow k=\frac{\pi n}{d} , n\in\N\\ | ||
\phi(y=0)=g(x)\cdot D=0 \Rightarrow D=0 | \phi(y=0)=g(x)\cdot D=0 \Rightarrow D=0 | ||
\end{cases}</math>עד כה, את הפיתרון ניתן לייצג באופן הבא: | \end{cases} | ||
</math> | |||
עד כה, את הפיתרון ניתן לייצג באופן הבא: | |||
<math display="block">\phi = \sum_n \tilde A_n \sin(\frac{\pi n}{d}x) | <math display="block"> | ||
\phi = \sum_n \tilde A_n \sin(\frac{\pi n}{d}x) | |||
\underbrace{\sinh(\frac{\pi n a}{d})}_{\text{Constant}} =V(x) | \underbrace{\sinh(\frac{\pi n a}{d})}_{\text{Constant}} =V(x) | ||
</math>ניתן לכתוב לפיכך: | </math> | ||
ניתן לכתוב לפיכך: | |||
<math display="block">\phi = \sum_n \tilde B_n \sin(\frac{\pi n}{d} x), \tilde B_n\equiv \tilde A_n | <math display="block">\phi = \sum_n \tilde B_n \sin(\frac{\pi n}{d} x), \tilde B_n\equiv \tilde A_n | ||
\sinh(\frac{\pi n a}{d})</math>הערות: | \sinh(\frac{\pi n a}{d})</math> | ||
הערות: | |||
# הטור הוא מייצג של פיתוח של פונקציות מחזוריות. נשאלת השאלה - אז איזו פונקציה אנחנו מפתחים לטור? | # הטור הוא מייצג של פיתוח של פונקציות מחזוריות. נשאלת השאלה - אז איזו פונקציה אנחנו מפתחים לטור? | ||
# מה המחזור של הפונקציה שמיוצגת על ידי הטור הנתון? | # מה המחזור של הפונקציה שמיוצגת על ידי הטור הנתון? | ||
המחזור הכי גדול הוא של האיבר הראשון <math>\sin(\frac{\pi x}{d})</math>, שהמחזור שלו הוא 2d. נסיק כי המחזור של הפונקציה הוא 2d. | המחזור הכי גדול הוא של האיבר הראשון <math>\sin(\frac{\pi x}{d})</math>, שהמחזור שלו הוא <math> 2d </math>. נסיק כי המחזור של הפונקציה הוא <math> 2d </math>. | ||
לפונקציה המחזורית המלאה נקרא <math>\tilde V(x)</math>. | לפונקציה המחזורית המלאה נקרא <math>\tilde V(x)</math>. | ||
בתחום <math>0<x<d</math> מתקיים: <math>\tilde V(x) = V(x)</math>. | בתחום <math>0<x<d</math> מתקיים: <math>\tilde V(x) = V(x)</math>. מאחר ומדובר בפיתוח לטור סינוסים נרחיב את הפונקציה <math> V(x) </math> הנתונה הרחבה אי-זוגית כדי לקבל את <math> \tilde{V}(x) </math>, למחזור של <math> 2d </math>. | ||
עכשיו רק נותר למצוא את המקדמים בפיתוח של <math>\tilde V(x)</math> לטור הסינוסים: | עכשיו רק נותר למצוא את המקדמים בפיתוח של <math>\tilde V(x)</math> לטור הסינוסים: | ||
<math display="block">\tilde V(x) = \sum_n B_n \sin(\frac{\pi n}{d} x) \text{ (*)}</math>נשתמש בפונקציה <math>V(x)=V_0</math>: | <math display="block">\tilde V(x) = \sum_n B_n \sin(\frac{\pi n}{d} x) \text{ (*)}</math> | ||
נשתמש בפונקציה <math>V(x)=V_0</math>: | |||
נכפול את הביטוי (*) ב <math>\int_{-d}^d \sin(\frac{\pi}{d} mx) dx</math>: | נכפול את הביטוי (*) ב <math>\int_{-d}^d \sin(\frac{\pi}{d} mx) dx</math>: | ||
| Line 281: | Line 313: | ||
<math display="block">\tilde B_m \int_{-d}^d \sin^2(mx) \cdot \frac{\pi}{d} dx = | <math display="block">\tilde B_m \int_{-d}^d \sin^2(mx) \cdot \frac{\pi}{d} dx = | ||
2\int^d_0 V_0 \sin(\frac{\pi}{d} mx) dx</math>נקבל: | 2\int^d_0 V_0 \sin(\frac{\pi}{d} mx) dx</math>נקבל: | ||
<math display="block">\tilde B_m \cdot d = | <math display="block">\tilde B_m \cdot d = | ||
2\int_0^d V_0 \sin(mx \cdot \frac{\pi}{d}) dx</math><math display="block">\Rightarrow \tilde B_m = | 2\int_0^d V_0 \sin\left(mx \cdot \frac{\pi}{d}\right) dx</math><math display="block">\Rightarrow \tilde B_m = | ||
\frac{4 V_0 d}{\pi m} \cdot | \frac{4 V_0 d}{\pi m} \cdot | ||
\begin{cases} 0 , & \text{if }m\text{ is even} \\ 1, & \text{if }m\text{ is odd} \end{cases}</math><math display="block">\Rightarrow | \begin{cases} 0 , & \text{if }m\text{ is even} \\ 1, & \text{if }m\text{ is odd} \end{cases} | ||
</math> | |||
<math display="block">\Rightarrow | |||
\phi = \sum_n \frac{8V_0}{(2n-1)\pi} \cdot | \phi = \sum_n \frac{8V_0}{(2n-1)\pi} \cdot | ||
\frac{1}{\sinh | \frac{1}{\sinh\left[\frac{\pi a}{d}\cdot (2n-1)\right]}\cdot | ||
\sin(\frac{(2n-1)\cdot \pi x}{d})\cdot | \sin\left(\frac{(2n-1)\cdot \pi x}{d}\right)\cdot | ||
\sinh | \sinh\left[\frac{(2n-1)\pi}{d}y\right] | ||
</math> | |||
<math display="block">\Rightarrow | |||
\vec E = -\nabla \phi = | \vec E = -\nabla \phi = | ||
\sum_n \frac{-8V_0}{d \sinh(\frac{(2n-1)\pi a}{d})}[ | \sum_n \frac{-8V_0}{d \sinh(\frac{(2n-1)\pi a}{d})}\left[ | ||
\cos(\frac{(2n-1)\pi x}{d} )\cdot \sinh | \cos\left(\frac{(2n-1)\pi x}{d} \right)\cdot \sinh\left[\frac{(2n-1)\pi y}{d}\right] \hat x + | ||
\sin(\frac{(2n-1)\pi x}{d} )\cdot \cosh | \sin\left(\frac{(2n-1)\pi x}{d} \right)\cdot \cosh\left[\frac{(2n-1)\pi y}{d}\right] \hat y | ||
]</math> | \right] | ||
</math> | |||
<gallery widths=900px heights=450px class="center"> | |||
File:Pic607.png| איור 7 - תרשים שדה (אדום) וקווים שווי פוטנציאל (שחור) | |||
</gallery> | |||
'''מה הקיבול?''' | '''מה הקיבול?''' | ||
| Line 315: | Line 354: | ||
[[File:Pic609.png|200px|thumb|left|איור 9 - גרף מקורב לקיבול]] | [[File:Pic609.png|200px|thumb|left|איור 9 - גרף מקורב לקיבול]] | ||
Latest revision as of 09:43, 20 February 2022
בהרצאות הקודמות ראינו את החשיבות של פתרון הבעיה הסטטית כבסיס לכל בעית EQS.
הגדרת הבעיה[edit | edit source]

את הפיתרון הפרטי למשוואת פואסון אנחנו כבר יודעים לחשב. נביט בתחום כלשהו , בו קיימים מטענים שצפיפותם (איור 1). תנאי השפה יכולים להיות להיות באופן כללי נתונים כתנאי שפה דיריכלה על חלק מהשפה, ותנאי שפה נוימן על החלק האחר, ובלבד שמוגדרים על פני כל השפה. ולכן, התאור המלא של הבעיה נתון על ידי משוואות פואסון, ותנאי השפה שהיא צריכה לקיים. באופן כללי, תנאי השפה יכול להיות כזה שעל חלק מהשפה (נכנה את הנקודות האלו , קו שחור באיור 1) נתון תנאי שפה דיריכלה, ועל חלקה (נכנה אותן , קו צהוב באיור 1) תנאי נוימן.
כפי שכבר ראינו (לדוגמא בשיטת השיקופים), את הפתרון ניתן לפרק לסכום של פתרון פרטי (הנובע מפילוג המטען הנתון, אך לאו דווקא מקיים את תנאי השפה הדרושים) אותו ניתן לקבל באמצעות סופרפוזיציה, ופתרון הומוגני (פתרון ללא מקורות).
כאשר הפתרון ההומוגני מקיים את המשוואה ללא המקורות - משוואת לפלאס .
תכונות הפתרון[edit | edit source]
עקרון המינימום / מקסימום[edit | edit source]
עקרון זה קובע כי לפתרונות משוואת לפלאס אין נקודות קיצון מקומיות בתוך התחום.
אינטואיטיבית: אם קיים למשל מינימום, אז השדה בסביבה כלשהו של נקודת המינימום בפוטנציאל יהיה מכוון אל המינימום. במקרה כזה, אם נבנה מעטפת קטנה סביב הנקודה, ונשתמש בחוק גאוס
ולכן חייב להיות מטען בנקודה. אבל מקיים את משוואת לפלאס, כלומר הפוטנציאל הוא ללא מטענים בתחום, ולכן, לא יתכן שיש קיצון מקומי. (הטיעון תקף גם לנקודת מקסימום).
באופן ריגורוזי יותר, בנק' קיצון מקומית . כדי שזה אכן יהיה קיצון, נרשום את מטריצת ההסיאן:
ולהאסיאן זה צריכים להיות ערכים עצמיים שהם כולם חיוביים (נקודת מינימום) או כולם שליליים (נקודת מקסימום):
ולכן לא יכולות להיות נקודות קיצון.
מכאן נובע ש מקבלת את ערכי הקיצון שלה על השפה. אחת המסקנות מכאן היא שאם קבועה על השפה, אז היא חייבת להיות קבועה בכל התחום ומכך נבין כי השדה בתוך התחום יהיה אפס.
יחידות הפתרון (פואסון)[edit | edit source]
נניח בשלילה שיש 2 פתרונות לבעיה , . נגדיר:
ולכן:
מה לגבי תנאי שפה?
המטרה: להראות ש , ומכאן ינבע ש .
אם נצליח להראות שהאנרגיה האגורה ב מתאפסת נוכל להסיק ש- הוא אפס זהותית בכל התחום. האנרגיה החשמלית האגורה בתחום היא:
נרצה לקשר את הביטוי ל לערכי או על השפה, על מנת להעזר בתנאי השפה הנתונים לנו.
נשתמש בזהות הוקטורית: ונקבל:
כעת נציב זאת בביטוי לאנרגיה האגורה בנקודה מתקיים
בנקודה מתקיים
ולכן האינטגרנד מתאפס בכל מקום על השפה:
בעזרת זהות זו ניתן גם לקשור את האנרגיה האגורה לפוטנציאל ולפילוג המטען אם הוא ידוע. נניח אינסופי, ואנו יודעים את פילוג המטען בכל מקום, והוא מוגבל לאזור סופי במרחב:
ממשפט הדיברגנץ נקבל:
ולכן:
משפט הערך הממוצע[edit | edit source]
משפט הערך הממוצע אומר שכל פתרון למשוואת לפלס בנקודה מסוימת שווה לממוצע ערכי הפתרון על כדור שהנקודה נמצאת במרכזו (איור 2).

את הפוטנציאל על שפת הכדור ניתן לרשום ע"י כאשר את האינטגרציה בחרנו לעשות בכיוון הרדיאלי. מאחר והשדה משמר, אנו רשאים לבחור את מסלול האינטגרציה כרצוננו. כעת, נציב בחישוב הערך הממוצע
נחליף את סדר האינטגרציה
ייצוג נומרי מקורב למשוואת לפלאס[edit | edit source]
משוואת לפלס בקורדינטות קרטזיות היא
אם נסתכל על נקודה ספציפית , נוכל לרשום את ערכי הפוטנציאל בסביבתה ע"י פיתוח של הפוטנציאל לטור טיילור
נניח ש . בנוסף נניח ש הוא ממש קטן, כך שקירוב סדר שני הוא מספיק.
נסכום את כל המשוואות:
נחלק ב - 6 ונקבל כלומר, בנקודה x,y,z שווה לממוצע של הערכים בנקודת הסריג שמקיפות את הנקודה.
פתרון בהפרדת משתנים[edit | edit source]
הפרדת משתנים היא טכניקת לפתרון משוואות דיפרנציאליות חלקיות כאשר פותרים בתחום ספרבילי - תחום שאת כל השפות שלו ניתן לתאר כמשטחים שווי קורדינטה. אפשרויות שונות לצורת התחום במערכות קורדינטות שונות ניתן לראות באיור 3.
-
 איור 3 - פתרון בהפרדת משתנים בקורדינטות שונות
איור 3 - פתרון בהפרדת משתנים בקורדינטות שונות

הפרדת משתנים בקורדינטות קרטזיות[edit | edit source]
משוואת לפלאס בקורדינטות אלו: פתרון בהפרדת משתנים הוא פתרון המורכב ממכפלה של פונקציות, שכל אחת מהן תלויה במשתנה אחד בלבד, מהצורה
נציב בלפלאס: נחלק ב , ונקבל:
מאחר וכל אחד מהמחוברים תלוי במשתנה יחיד, ושונה מהמחוברים האחרים, נובה שכל אחד משלושת המחברים חייב להיות פונקציה קבועה שאינה תלויה בקורדינטות. הקבועים חייבים לקיים את הקשר מכאן, הבעיה "מופרדת" ל-3 משוואות דיפרנציאליות רגילות:
- הפיתרון הטריוויאלי:
- במקרה הכללי:
נחלק לשני מקרים:
כאשר .
באופן כללי, תמיד ניתן לרשום:
מכיוון ש , חלק מהקבועים חייבים להיות מדומים.
אופציה נוספת: לכתוב חלק מהפתרונות כפונקציות טריגונומטריות וחלק כאקספוננציאליות, כך ש:
קורדינטות קרטזיות - דוגמא 1[edit | edit source]

באיור 4 נתון קבל לוחות. מתקיים -
- הפוטנציאל בין לוחות הקבל מקיים
- התחום ספירבילי
- תנאי שפה:
מאחר וערך הפוטנציאל קבוע על משטחים שווי z:
נציב תנאי שפה:
קורדינטות קרטזיות - דוגמא 2[edit | edit source]

באיור 5 נתון המבנה הבא - חריץ דו-ממדי (אינסופי בכיוון הניצב לדף), ומעליו קובעים את הפוטנציאל על השפה העליונה, . נרצה לחשב את הפוטנציאל בתוך החריץ.
מאחר והבעיה דו-ממדית, נצפה שהפוטנציאל כלל לא יהיה תלוי בקורדינטה , ולכן . המשוואה שהפוטנציאל מקיים בתוך החריץ היא משוואת לפלאס, ולכן אנו יכולים לבחור את הפתרון מתוך "קטלוג" הפתרונות שפיתחנו לבעיות קרטזיות.
תנאי שפה: ולכן נכתוב את הפיתרון כך:
כאשר האינטואיציה לבחירת צורה זו נובעת מהעובדה שהפוטנציאל בבעיה זו מתאפס בשתי קורדינטות שונות, ולכן בכיוון זה חייב להיות פתרון טריגונומטרי. נציב בתנאי שפה:
עד כה, את הפיתרון ניתן לייצג באופן הבא:
ניתן לכתוב לפיכך:
הערות:
- הטור הוא מייצג של פיתוח של פונקציות מחזוריות. נשאלת השאלה - אז איזו פונקציה אנחנו מפתחים לטור?
- מה המחזור של הפונקציה שמיוצגת על ידי הטור הנתון?
המחזור הכי גדול הוא של האיבר הראשון , שהמחזור שלו הוא . נסיק כי המחזור של הפונקציה הוא .
לפונקציה המחזורית המלאה נקרא .
בתחום מתקיים: . מאחר ומדובר בפיתוח לטור סינוסים נרחיב את הפונקציה הנתונה הרחבה אי-זוגית כדי לקבל את , למחזור של .
עכשיו רק נותר למצוא את המקדמים בפיתוח של לטור הסינוסים:
נשתמש בפונקציה :
נכפול את הביטוי (*) ב :
מאורתוגונליות:
נקבל:
-
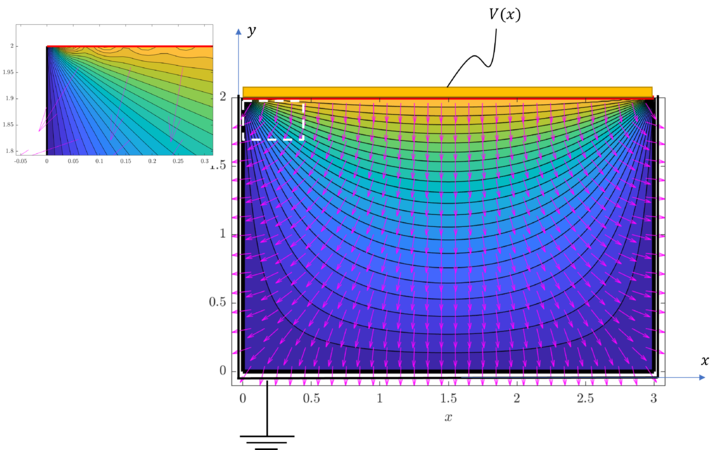 איור 7 - תרשים שדה (אדום) וקווים שווי פוטנציאל (שחור)
איור 7 - תרשים שדה (אדום) וקווים שווי פוטנציאל (שחור)

מה הקיבול?

כדי לחשב את הקיבול, נחשב את סף המטען על האלקטרודה .
נחשב את סך המטען:
אך זה מתבדר בגלל אי הרציפות של הפוטנציאל.
בבעיה אמיתית ניתן להניח שהשינוי של הפוטנציאל ב - δ (איור 8) הוא לינארי.
